Sensor View
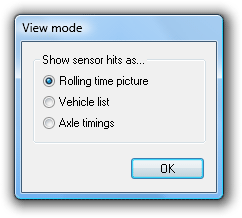
MCSetup provides several real-time views of the data being logged. The choice of view modes depends on the type of RSU connected, and the unit's current configuration and setup.
![[Procedure]](MTEHelp/images/procedure.png)
The Rolling Time view displays a variable-width window of recently logged sensor hits. As vehicles pass over the sensors, the logged hits are displayed on the time-line at the top, providing confirmation of correct sensor installation and RSU setup.
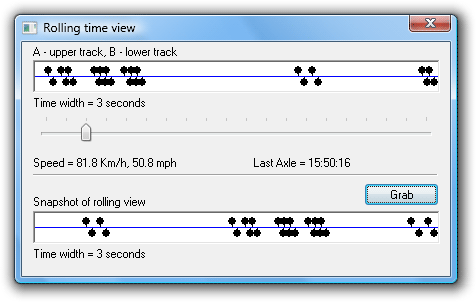
When using a Classifier Layout, there should be matching A and B sensor hits for each axle. The offset between matching hits is determined by the speed and direction of the vehicle. An approximate speed is displayed for the last pair of matching hits.
The Time width slider bar determines how many seconds the rolling window represents. Increasing the display width will increase the number of axles visible at a time, but will decrease the resolution.
![[Note]](MTEHelp/images/note.png)
|
Note |
|---|---|
|
The Last axle time is the time-stamp of the last logged sensor hit, giving the current time according to the RSU. Over the period of a survey, this time may drift from the time of the PC used to setup the RSU. If syncing manual counts at the end of a survey, remember to use the last axle time, not the PC's time. |
|
The Grab button copies the current time picture to the snapshot picture at the bottom.
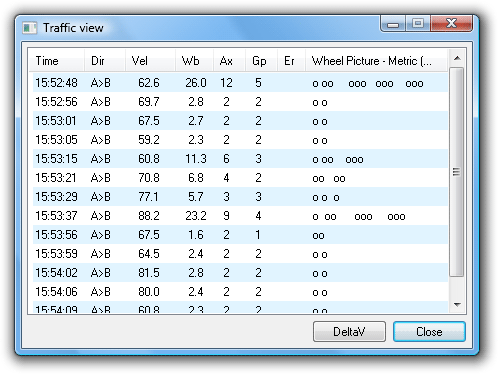
The Vehicle List mode provides a basic, on-the-fly partitioning from the immediate hit stream being logged by the RSU. It includes an array of information about each vehicle and a scaled wheel picture. The Vehicle List mode is only available when a Classifier Layout is used.
|
|
Note |
|---|---|
| The Vehicle List mode should only be used as a rough guide. Vehicles are formed by joining hits less than a fixed time (DeltaV) apart into a vehicle. Remember that in this mode, the RSU is logging time-stamped sensor hits - not vehicles. MCReport uses a more advanced partitioning algorithm. | |
| Parameter | Description |
|---|---|
| Time | Time of the first axle of the vehicle. |
| Direction (Dir) | Direction of the vehicle. |
| Velocity (Vel) | Speed of the vehicle. Units may be km/h or mph, depending on the selection of units in MCSetup's Preferences. |
| Wheelbase (Wb) | Wheelbase of the vehicle. Units may be metres or feet, depending on the selection of units in MCSetup's Preferences. |
| Axles (Ax) | Number of axles in the vehicle. |
| Groups (Gp) | Number of axle groupings in the vehicle. |
| Error (Er) | Error number indicating a mismatch in sensor hits. |
| Wheel Picture | Character based representation of vehicle axle groupings. |
| DeltaV | This setting is the minimum gap in the hit stream that MCSetup uses to separate vehicles. Note that this Delta-V setting does not affect the data that is being logged. |
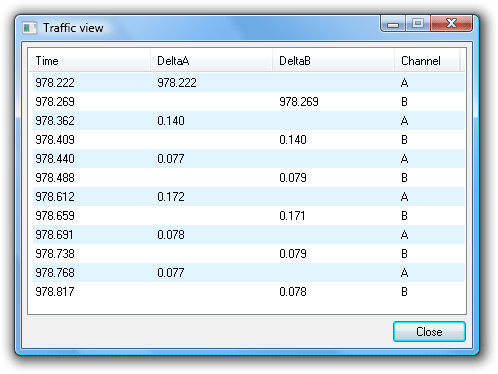
The Axle Timings mode displays the raw hit information that the RSU is logging. The Axle Timings mode is only available for a Classifier Sensor Layout.